MAS (Multi-Agent System) の基本形をアプライした例: mas_dla_000.gh
DLA (Diffusion-Limited Aggregation)
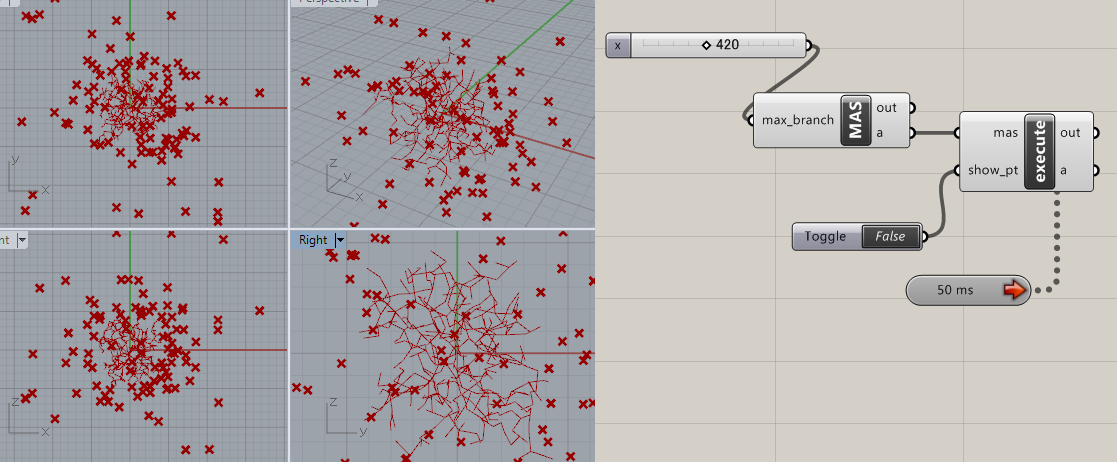
mas_dla_000.gh で形に影響の出るAgent の動きのコード編集(関数seedPos(self,R) と 関数walk(self) )
15行目(関数seedPos)
vec.X = random.uniform(-range,range)
↓
vec.X = random.uniform(0,range)
24行目(関数walk)
vecRm.X = random.uniform(-range,range)
↓
vecRm.X = random.uniform(0,range)
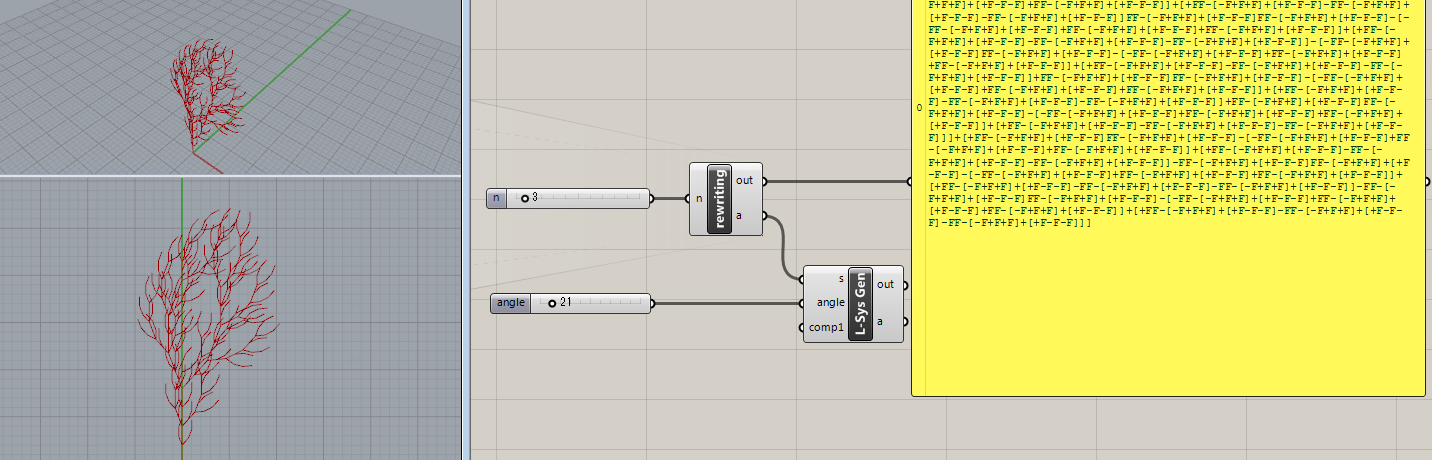
L-System(Lindenmayer system)について:
L-system教科書 ”The Algorithmic Beauty of Plants” L-systemのバリエーションや派生モデルが紹介されている / 出典サイト:algorithmicbotany.org
- Rhino-grasshopper – GhPythonでどのように表現するか
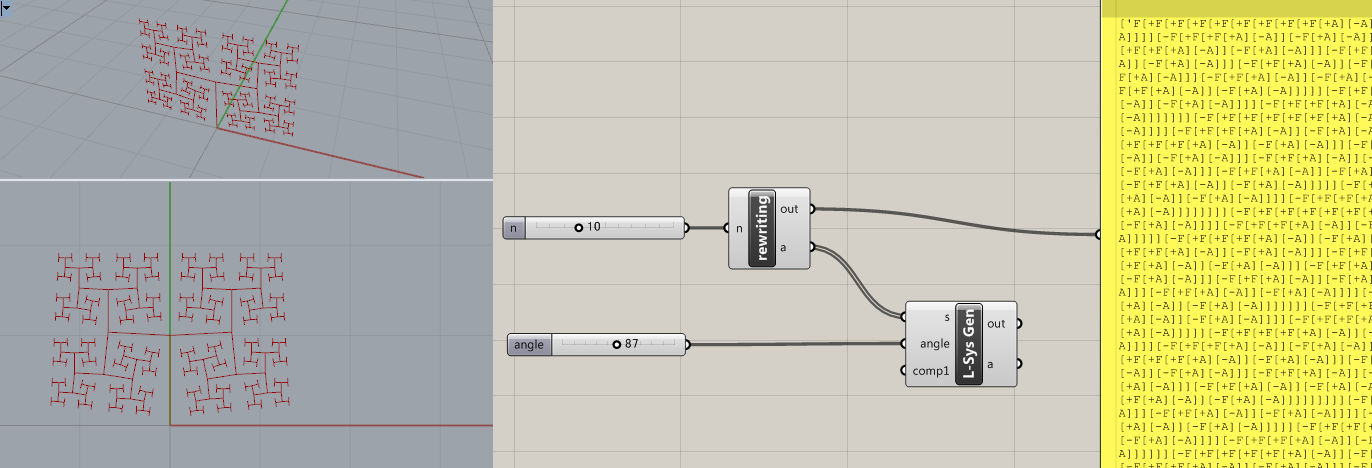
- L-Systemの文字列パターンから図形を出力するpython コンポーネント :lsys_gen.gh
- 書き換え関数の実装 : lsys_rewrite.gh

サンプル中のL-systemの書き換えルールは L-system教科書 のp.37 右上 c のパターンになります。 - ノード書き換え型のL-System を実現するrewrite関数
- エッジ書き換え型のL-System を実現するrewrite関数
- 派生L-systemパラメータ付き書き換え関数 (授業中に編集したファイル: lsys_rewrite_parametric.gh)

Comments are closed.